IRISformer: Dense Vision Transformers
for Single-Image Inverse Rendering in Indoor Scenes
CVPR 2022 (Oral presentation)
- 1UC San Diego
- 2Qualcomm AI Research


Overview
Indoor scenes exhibit significant appearance variations due to myriad interactions between arbitrarily diverse object shapes, spatially-changing materials, and complex lighting. Shadows, highlights, and inter-reflections caused by visible and invisible light sources require reasoning about long-range interactions for inverse rendering, which seeks to recover the components of image formation, namely, shape, material, and lighting.
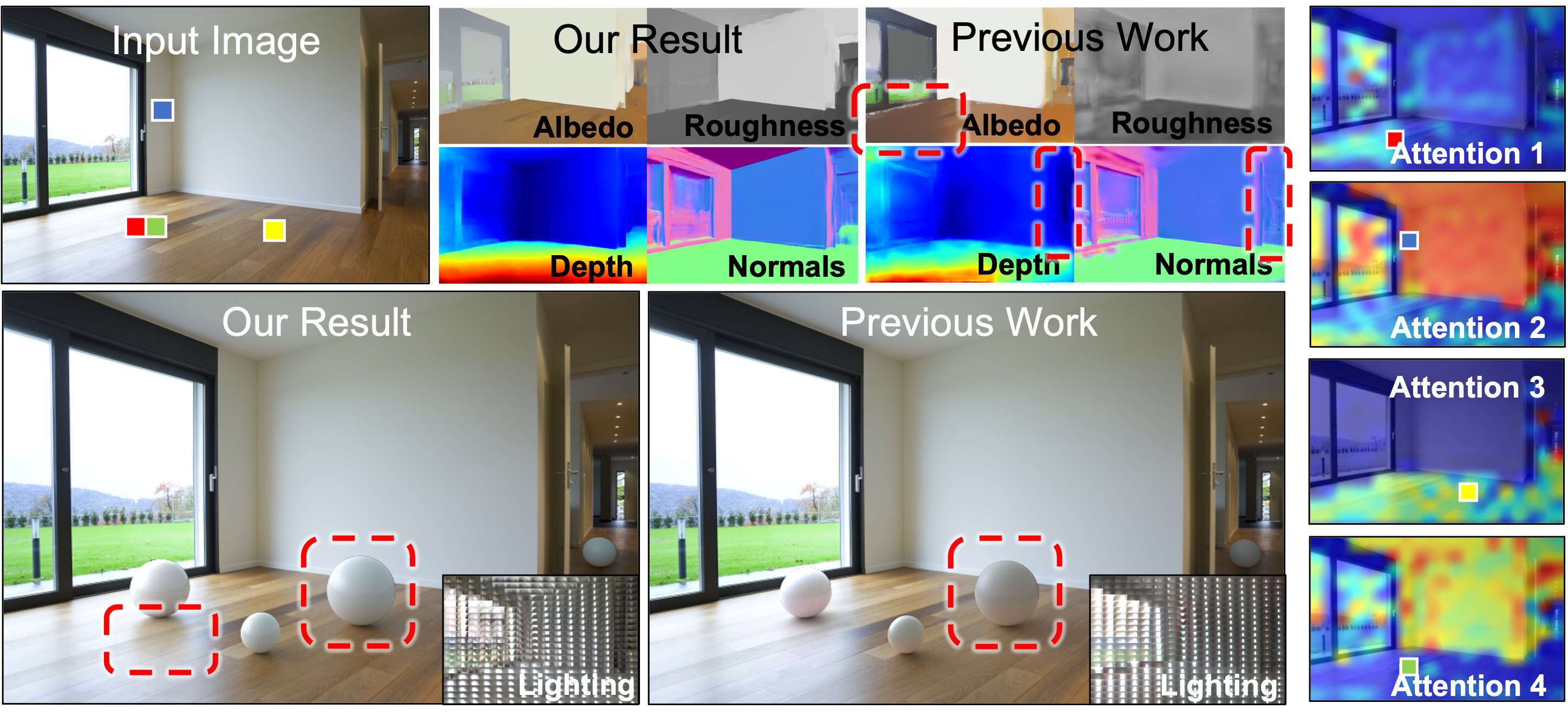
In this work, our intuition is that the long-range attention learned by transformer architectures is ideally suited to solve longstanding challenges in single-image inverse rendering. We demonstrate with a specific instantiation of a dense vision transformer, IRISformer, that excels at both single-task and multi-task reasoning required for inverse rendering. Specifically, we propose a transformer architecture to simultaneously estimate depths, normals, spatially-varying albedo, roughness and lighting from a single image of an indoor scene. Our extensive evaluations on benchmark datasets demonstrate state-of-the-art results on each of the above tasks, enabling applications like object insertion and material editing in a single unconstrained real image, with greater photorealism than prior works.
Highlights
- Given a single real-world image, inferring material (albedo and roughness), geometry (depth and normals), spatially-varying lighting of the scene.
-
Two-stage model design with Transformer-based encoder-decoders:
- multi-task setting: sharing encoder-decoders with smaller model;
- single-task setting: independent encoder-decoders with better accuracy.
- Demonstrating the benefits of global attention to reason about long-range interactions.
-
State-of-the-art results in:
- per-pixel inverse rendering tasks on OpenRooms dataset;
- albedo estimation on IIW dataset;
- object insertion on natural image datasets.